Введение
В процессе общей сборки автомобиля сборка шин является ключевым постом. Шины — единственная часть автомобиля, контактирующая с дорогой, и качество их сборки напрямую влияет на безопасность и комфорт автомобиля. Загрузка шин — извлечение шин из тары и размещение на роликовом конвейере — является первым шагом линии сборки шин, и ее эффективность и стабильность определяют общий такт линии.
Традиционные методы загрузки шин с помощью ручного труда или полуавтоматических манипуляторов имеют следующие недостатки:
-
Высокая физическая нагрузка: вес шины 15-30 кг, частая ручная загрузка приводит к усталости
-
Неточное позиционирование: сложно обеспечить единообразие захвата из тары
-
Низкая эффективность: ручная загрузка становится узким местом линии
-
Плохая совместимость с тарой: разные типоразмеры шин требуют разных тар
Поэтому нестандартная система манипулятора загрузки шин на основе визуального наведения становится ключевым фактором повышения автоматизации линии сборки шин.
Компания Shenyang Vega Heavy Industry Co., Ltd. (Вега Хэви Индастри) специализируется на предоставлении полного спектра услуг под ключ для нестандартных манипуляторов загрузки шин. Мы объединяем технологии визуального позиционирования, робототехники и автоматизации для создания высокоточных, эффективных и надежных решений.
-
Что такое система манипулятора загрузки шин?
Манипулятор загрузки шин — это нестандартное автоматизированное захватное устройство, обычно используемое совместно с промышленными роботами для извлечения шин из тары и размещения на роликовом конвейере. Основной процесс:
| Этап | Описание |
|---|---|
| 1. Фотографирование | Промышленная камера делает снимок шин в таре для получения информации о положении |
| 2. Расчет координат | Визуальное ПО обрабатывает изображение, вычисляет центр шины и точку захвата |
| 3. Планирование пути | Робот планирует оптимальный путь захвата на основе полученных координат |
| 4. Автоматический захват | Манипулятор захватывает шину пневматическими губками или вакуумными присосками |
| 5. Загрузка на конвейер | Манипулятор размещает шину на роликовом конвейере в заданном положении |
| 6. Сигнал готовности | Отправка сигнала на конвейер и систему управления линией |
-
Услуги по нестандартному проектированию
Мы предоставляем полный цикл услуг под ключ, включая следующие ключевые этапы:
2.1 Нестандартное проектирование
Мы разрабатываем индивидуальную систему манипулятора загрузки шин на основе типоразмеров шин, конструкции тары и планировки цеха:
-
Анализ характеристик шин: анализ внешнего диаметра (15-22 дюйма), веса (15-30 кг), материала протектора
-
Выбор механизма захвата: пневматические губки (захват боковины) или вакуумные присоски (захват протектора) или комбинация
-
Проектирование визуальной системы: подбор камеры (5-20 Мп) и объектива с учетом глубины тары, проектирование освещения
-
Разработка алгоритма: распознавание центра шины, краев, количества слоев, расчет координат захвата
-
Выбор и адаптация робота: шестиосевой робот (грузоподъемность 50-100 кг) или портальный робот
-
Проектирование безопасности: лазерный радар, безопасный световой барьер, кнопка аварийной остановки
2.2 Изготовление и наладка
-
Прецизионное изготовление: изготовление корпуса манипулятора, губок/присосок, кронштейнов камеры
-
Пневматический/электрический монтаж: сборка цилиндров, клапанов, вакуумных генераторов, датчиков
-
Развертывание визуальной системы: установка ПО, загрузка модели распознавания шин, калибровка камеры
-
Программирование робота: написание программы захвата, включая планирование пути и позы
-
Наладка на заводе: тестирование без нагрузки и с нагрузкой, калибровка точности позиционирования, успешности захвата, такта
2.3 Развертывание на площадке и обучение
-
Установка на площадке: монтаж робота, визуальной системы, манипулятора у заказчика
-
Калибровка на месте: настройка параметров камеры и освещения в реальных условиях
-
Комплексная отладка: тестирование синхронизации с роликовым конвейером и PLC
-
Обучение персонала: инструктаж по эксплуатации визуальной системы, основам программирования робота, устранению неисправностей
-
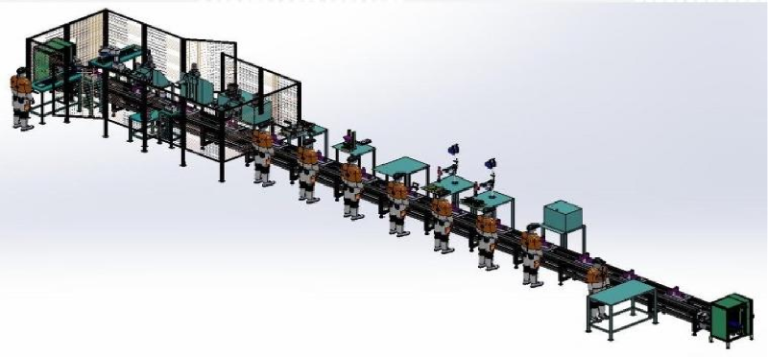
Проект-кейс: линия сборки шин сборочного цеха BMW Brilliance
BMW Brilliance — один из самых передовых производителей автомобилей премиум-класса в Китае. На линии сборки шин сборочного цеха предъявляются высокие требования к эффективности и точности загрузки. В этом проекте требовалось автоматически извлекать шины разных типоразмеров из штабелируемой тары и размещать на роликовом конвейере с тактом ≤30 секунд.
Компания Shenyang Vega Heavy Industry поставила для линии сборки шин сборочного цеха BMW Brilliance комплектную нестандартную систему манипулятора загрузки шин.
Основные параметры проекта
| Параметр | Значение |
|---|---|
| Типоразмер шин | 16-20 дюймов (смешанное производство) |
| Вес шины | 18-25 кг |
| Способ захвата | Пневматические губки (боковина) + вспомогательные присоски |
| Визуальная система | 12 Мп промышленная CCD-камера + кольцевой светодиодный свет |
| Точность позиционирования | ±3 мм |
| Такт захвата | ≤25 секунд |
| Успешность захвата | ≥99,5% |
| Партнер-робот | Шестиосевой робот (грузоподъемность 80 кг) |
Ключевые особенности проекта
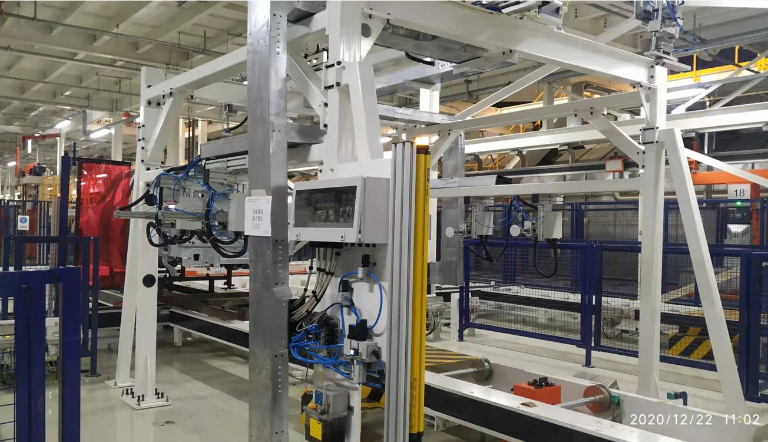
Особенность 1: Фотографирование камерой — точное определение положения шин
На посту захвата мы установили 12-мегапиксельную CCD-камеру над зоной тары. Комбинированное освещение обеспечило четкие изображения боковины и протектора без бликов.
Визуальное ПО на основе алгоритмов глубокого обучения автоматически распознает:
-
Количество слоев шин в таре (до 3 слоев)
-
Координаты центра шины в каждом слое
-
Ориентацию шины (правильная/наклонная)
-
Расстояние от края шины до стенки тары (для предотвращения столкновений)
Система автоматически планирует порядок захвата сверху вниз.
Особенность 2: Расчет координат и планирование пути
Визуальная система передает роботу координаты центра шины (X, Y, Z и угол поворота R). Робот планирует оптимальный путь:
-
Быстрое перемещение на безопасное расстояние над шиной
-
Замедление и приближение к поверхности
-
Синхронизация позы захвата с углом шины
-
Выполнение захвата
Планирование пути и настройка позы занимают менее 0,5 секунды.
Особенность 3: Автоматический захват и загрузка на конвейер
Манипулятор использует комбинированную схему: пневматические губки + вспомогательные присоски:
-
Губки захватывают боковину шины, обеспечивая основное усилие
-
Присоски фиксируют протектор, предотвращая раскачивание
После срабатывания датчика подтверждения захвата робот перемещает шину на роликовый конвейер и размещает в центре конвейера (точность ±3 мм). После завершения робот возвращается, а конвейер получает сигнал для транспортировки шины.
Результаты проекта
После внедрения системы на линии сборки шин BMW Brilliance получены следующие результаты:
| Показатель | До (ручная загрузка) | После (визуальный манипулятор) |
|---|---|---|
| Такт загрузки | 45 секунд | 23 секунды |
| Отклонение позиционирования | ±15 мм | ±2,5 мм |
| Успешность захвата | ~98% | 99,6% |
| Вмешательство оператора | Постоянно | Только дозагрузка тары |
| Персонал | 2 человека/смену | 0,5 человека/смену |
Проект позволил обеспечить полностью автоматическую загрузку шин на линии сборки BMW Brilliance, значительно повысив эффективность и точность позиционирования, снизив физическую нагрузку на персонал. Заказчик высоко оценил результаты.
-
Ключевые преимущества системы
| Преимущество | Описание |
|---|---|
| Визуальное наведение | Промышленная камера + алгоритмы глубокого обучения для точного позиционирования |
| Высокая точность захвата | Точность позиционирования до ±2 мм, успешность ≥99,5% |
| Высокая скорость | Такт загрузки до 20 секунд на шину |
| Широкая адаптивность | Поддержка шин 15-22 дюймов и различных типов тары |
| Полная автоматизация | От распознавания до загрузки — без участия человека |
| Безопасность | Многоуровневая защита для безопасной работы человека и робота |
-
Процесс реализации проекта
-
Анализ требований и разработка концепции (визуальная симуляция, разработка алгоритма)
-
Изготовление нестандартного манипулятора и развертывание визуальной системы
-
Предварительная наладка и тестирование захвата на заводе
-
Установка и калибровка визуальной системы на площадке
-
Комплексная отладка и пробный запуск
-
Приемка заказчиком и обучение персонала
-
Передача чертежей и руководств по эксплуатации, начало гарантийного обслуживания
-
Почему выбирают Shenyang Vega Heavy Industry?
-
Многолетний опыт в автомобильной индустрии
-
Работа с такими автопроизводителями, как BMW Brilliance, FAW-Volkswagen
-
Компетенция механического проектирования + электротехники + визуальных алгоритмов + интеграции роботов
-
Техническая документация и поддержка на русском, китайском и английском языках
-
Строгое соблюдение стандартов безопасности и качества автопроизводителей
-
Зрелая технология визуального наведения, множество успешных проектов